



badacze z Instytut Technologii w Massachusetts Massachusetts Institute of Technology (MIT) stworzył proces projektowy, aby uprościć proces budowy niestandardowej robotycznej dłoni z czujnikami dotykowymi.
Użytkownicy nie potrzebują żadnej specjalistycznej wiedzy, aby zaimplementować nowy potok projektowy, o którym mówi się, że jest znacznie szybszy niż tradycyjny proces prób i błędów projektowania niestandardowego manipulatora robota. Po przygotowaniu projektów przez użytkowników, procesor jest drukowany w 3D, a czujniki są łączone za pomocą dzianej rękawicy, która pasuje do dłoni robota.
„Jedną z najbardziej ekscytujących rzeczy w tym rurociągu jest to, że czyni projekt bardziej dostępnym dla ogółu społeczeństwa” – powiedziała Lara Zlucaba, główna autorka badania i studentka MIT.
„Zamiast spędzać miesiące lub lata na pracy nad projektem i wkładać dużo pieniędzy w prototypowanie, możesz mieć działający prototyp w ciągu kilku minut”.
MIT przez lata był zaangażowany w szereg innowacyjnych projektów druku 3D. Tylko w tym roku zespoły z uczelni opracowały plik Nowy sposób osadzania informacji w obiektach fizycznych Dzięki drukowi 3D niewidocznemu gołym okiem i wymyśleniu nowej technologii dla Druk 3D obiektów, które zmieniają swój wygląd W zależności od kąta, pod jakim jest oglądany.
Ostatnio badacze z MIT i Uniwersytet w Calgary Opracowali nowy typ Robotyczna kostka wykorzystująca technologię druku 3D. Samokonfigurujące się bloki robotów, zwane ElectroVoxels, mogą łączyć się w różne kształty za pomocą wbudowanego elektromagnesu jako mechanizmu operacyjnego.

Zintegrowany rurociąg projektowy
Zazwyczaj eksperci w dziedzinie robotyki mogą spędzić miesiące na ręcznym projektowaniu niestandardowego manipulatora robota za pomocą technik prób i błędów. Ponadto każda iteracja projektu może wymagać nowych części, które należy zaprojektować i przetestować od podstaw.
Zespół MIT starał się znacznie skrócić czas i złożoność tego procesu, tworząc zintegrowany potok projektowy, aby umożliwić użytkownikom bez specjalistycznej wiedzy szybkie stworzenie niestandardowej robotycznej dłoni do druku 3D.
Opisany jako podobny do budowania z cyfrowych klocków Lego, projektant może wykorzystać intuicyjny interfejs zespołu do zaprojektowania własnego robota manipulatora z zestawu 15 modułowych komponentów, które gwarantują, że można je wydrukować w 3D. Po zmieszaniu i dopasowaniu komponentów w przestrzeni projektowej 3D, projektant może dostosować dłoń i palce robotycznej ręki, aby dopasować je do określonego zadania, zanim włączy czujniki dotykowe do ostatecznego projektu.
Interfejs opiera się na zestawie reguł produkcyjnych, znanych jako reguły wykresów, które kontrolują sposób, w jaki użytkownicy integrują różne komponenty.
„Jeśli pomyślimy o tym jako o zestawie Lego, w którym masz różne klocki, które możesz złożyć, gramatyka może być czymś w rodzaju „czerwone klocki można umieścić tylko na niebieskich klockach” i „niebieskie klocki nie mogą być umieszczone na wierzchu” – powiedział Zlukaba. „Zasady wykresu pozwalają nam upewnić się, że każdy projekt jest poprawny, co oznacza, że ma sens i można go wyprodukować”.
Po utworzeniu struktury procesora, użytkownik może następnie zdeformować komponenty, aby dodatkowo dostosować je do określonego zadania, takiego jak tworzenie palców z cieńszymi końcami do obsługi nożyczek biurowych lub zakrzywionych palców zdolnych do chwytania butelek. Aby to umożliwić, oprogramowanie otacza każdy element cyfrową klatką, którą można wysuwać i wyginać, ale ruchy są ograniczone, aby zapewnić prawidłowe dopasowanie elementów i możliwość ich wykonania.
Po zakończeniu projektu oprogramowanie MIT automatycznie generuje pliki do druku 3D i dziania maszynowego do produkcji manipulatorów. Czujniki dotykowe są następnie integrowane z robotem za pomocą dzianej rękawicy, która wygodnie leży w dłoni i umożliwia wykonywanie złożonych zadań, takich jak podnoszenie przedmiotów lub używanie narzędzi.
Integracja czujników
Gdy użytkownik zaprojektuje, spersonalizuje i wydrukuje w 3D swój zrobotyzowany procesor, może wybrać żądane lokalizacje czujników dotykowych. Czujniki są zintegrowane z dzianą rękawicą, która ściśle przylega do świetlików i składa się z dwóch warstw; Jeden z poziomymi włóknami piezoelektrycznymi, a drugi z włóknami pionowymi.
Materiał piezoelektryczny po naciśnięciu wytwarza sygnał elektryczny, a gdy włókna poziome i pionowe przecinają się, przekształca bodźce ciśnieniowe w sygnały elektryczne, które można zmierzyć i tworzą czujniki dotykowe.
Zlokapa i jej zespół postanowili zintegrować czujniki z rękawicami, ponieważ są one łatwe w montażu i wymianie w przypadku konieczności naprawy czujników.
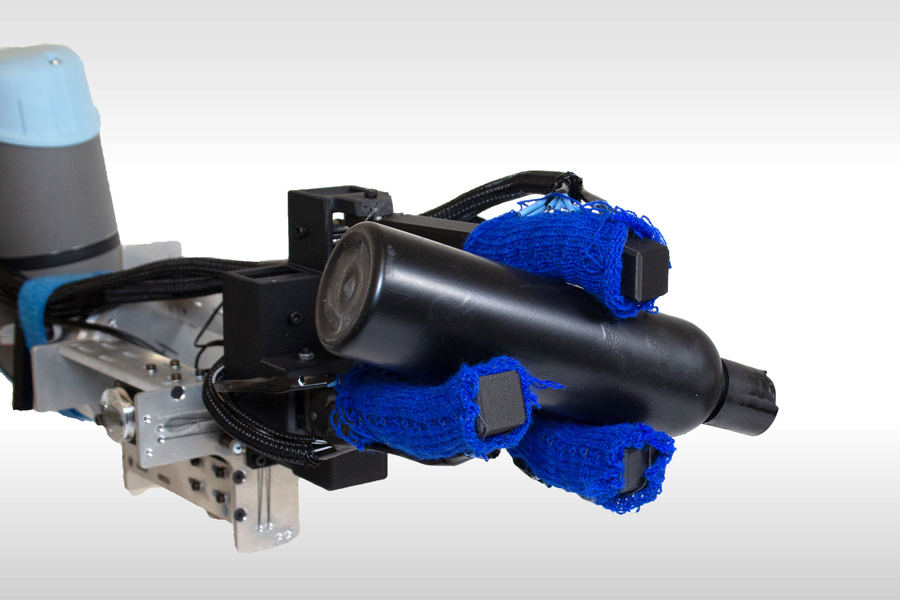
Aby przetestować skuteczność swojego projektu, naukowcy z MIT wydrukowali cztery niestandardowe uchwyty do różnych zadań, w tym podnoszenia jajka, cięcia papieru nożyczkami, wylewania wody z butelki i dokręcania nakrętki motylkowej.
Każdy z manipulatorów odpowiednio wykonał swoje zadania, niektóre nawet przekroczyły oczekiwania zespołu. Jednak naukowcy zauważyli, że czujniki wytwarzały dużo hałasu z powodu nierównej tekstury tkanych włókien, co utrudniało ich dokładność. Zespół pracuje obecnie nad stworzeniem bardziej niezawodnych czujników, które mogą poprawić wydajność manipulatorów.
Zlokapa i jej zespół badają również zastosowanie autonomicznej produkcji, w ramach której algorytmy mogą przeszukiwać przestrzeń projektową w celu określenia optymalnych konfiguracji dłoni robota do określonych zadań bez interwencji człowieka.
„Teraz, gdy dysponujemy komputerowym sposobem eksploracji tej przestrzeni projektowej, możemy popracować nad odpowiedzią na pytanie „Czy ludzka ręka jest optymalnym kształtem do wykonywania codziennych zadań?” „Może istnieje lepszy format?” – dodał Zlokapa. A może chcemy mniej lub więcej palców, albo palców skierowanych w różnych kierunkach?
„Te badania nie odpowiadają w pełni na to pytanie, ale są krokiem w tym kierunku”.

Zapisz się do Ulotka branżowa druku 3D Najnowsze wiadomości z dziedziny wytwarzania przyrostowego. Możesz również pozostać w kontakcie, śledząc nas Świergot i jak my Facebook.
Szukasz pracy w produkcji addytywnej? wizyta Zadania drukowania 3D Wybór ról w branży.
Subskrybuj naszą stronę Kanał Youtube Najnowsze filmy, drukowanie 3D, recenzje i powtórki webinaru.
Polecane oferty zdjęć Jedna z wydrukowanych w 3D robotycznych rąk MIT. Obraz za pośrednictwem MIT.

„Nieuleczalny myśliciel. Miłośnik jedzenia. Subtelnie czarujący badacz alkoholu. Zwolennik popkultury”.
More Stories
Emdoor przygotowuje się do zaprezentowania swoich osiągnięć w zakresie nowej technologii sztucznej inteligencji podczas targów Global Sources Mobile Electronics Show 2024.
LinkedIn wykorzystuje Twoje dane do szkolenia Microsoft, OpenAI i jego modeli AI – oto jak to wyłączyć
Zapomnij o Apple Watch Series 10 — Apple Watch Ultra 2 w kolorze Satin Black to smartwatch, który warto mieć